ドキ★ワク先端科学
| 教育研究紹介 TOP |
~読売新聞寄稿連載「ドキ★ワク先端科学」から~
第33回:情報科学研究科 松原崇充准教授 [2016年1月19日]「賢い行動 ロボにも備わる」 |

|
 |
|
私たちは日々の生活の中で、たくさんの不確実な事柄に出会います。例えば、朝起きた時、その日の天気を正確には見通せません。勘を頼りに傘を持たずに家を出れば、道中で雨に打たれてびしょ濡れになることもあります。しかし、天気の不確実性を自覚できていれば、事前にテレビやインターネットの天気予報をチェックして備えることができます。このような賢い行動を「探索行動」と呼びます。
探索行動は、人間や動物だけでなく、最近ではロボットにとっても大変重要になってきました。従来、ロボットは工場や実験室だけで活躍していました。今後は、急速な少子高齢化に伴う福祉、介護の人材不足など、様々な社会問題の解決策として、家の中や街中、病院など、幅広い場所での活躍が期待されています。そのような環境下では、人や物が周囲を動き回るので、ロボットも多くの不確実な出来事に出会います。そのため、与えられた仕事を確実に達成するためには、状況に応じて適切な探索行動がとれる知能(コンピュータプログラム)が必要になるというわけです。
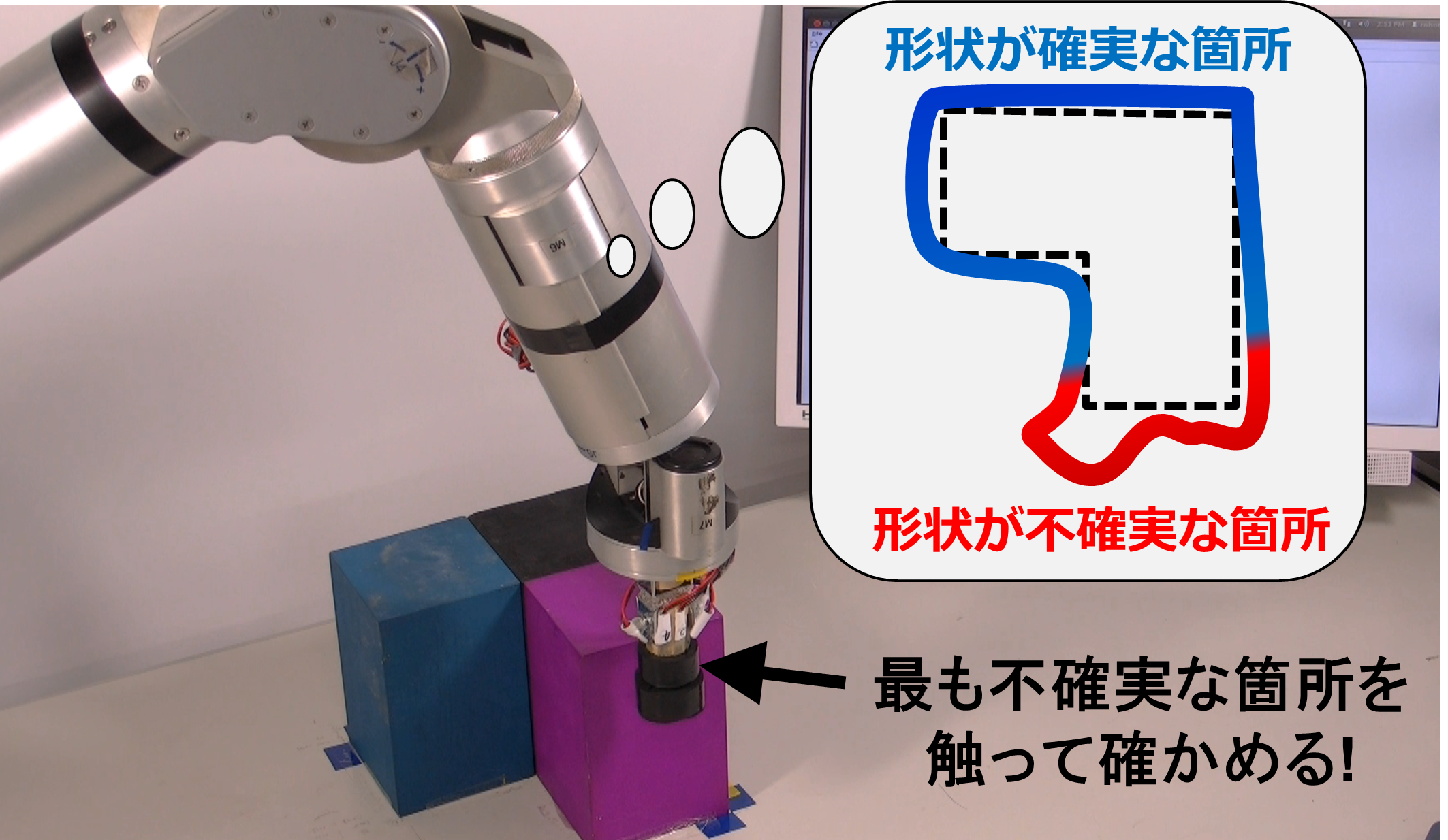
ロボットが片付けや作業を代行するために、必要なことは何でしょうか。例えば、テーブルの上に置かれたコップや道具をつかむ時、その形状をある程度、前もって正確に把握する必要があります。ところが、いきなり目の前に現れた物体がどのような形をしているか、普通のロボットは、すぐには見当がつきません。
私たちの研究室は、確率論や情報理論などの学問を基礎とする人工知能技術を応用することによって、そのような物体の形状に関する不確実性を直ちに自覚することができるロボットを開発しました。私たちのロボットは、状況をきちんと整理した上で、物体を触り、素早く正確に、その形状を把握することができます。
私たちの研究室では、金魚すくいや卓球をしたり、自力でTシャツを着たりするユニークなロボットの開発を通じて、近未来のロボットに必要な知能を幅広く研究しています。近年では、安価で高性能なセンサーやコンピューターが普及しています。それによって、人工知能などの技術が進歩し、将来的には、私たちよりも有能なロボットが登場するかもしれません。
