--Support tool for the "super aging society" mimicking the motions of a caregiver and autonomously tailoring them to the assisted person--
Overview
In Japan's "super aging society," an insufficient number of professional caregivers is generating high expectations for using robots to improve the quality of life (QoL) of the elderly and physically disabled. At the Graduate School of Information Science of the Nara Institute of Science and Technology (President: Akira Isogai), a group headed by Associate Professor Tomohiro Shibata of the Mathematical Informatics Laboratory and Assistant Professor Takamitsu Matsubara of the System Control Laboratory has successfully developed a robot for assisting people in putting on clothes.
Putting on and taking off clothes are essential activities in daily life, but for the elderly and hemiplegic patients, they can be difficult to perform due to limited mobility in the upper limbs. At the same time, there is a key technical problem that needs to be solved to achieve clothing assistance by a robot. Specifically, it is difficult to calculate beforehand the optimal robot motions for manipulating clothes--a non-rigid material--while in contact with an assisted person having a complicated shape, a certain amount of friction, and a continuously changing posture.
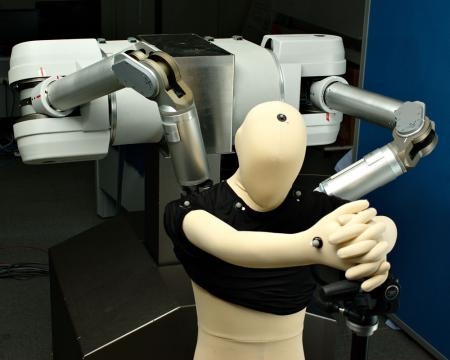
In response to this problem, the group headed by Associate Professor Tomohiro Shibata et al. has developed a dual-arm robot system that can acquire clothing-assistance motions applicable to the assisted person with a small number of trials. This is accomplished by performing a trial-and-error search called "reinforcement learning" based on actual motions used for clothing assistance as demonstrated by a human being.
Detailed results of this research will be presented at the 11th IEEE-RAS International Conference on Humanoid Robots--the most renowned international conference on humanoid research--to be held in Slovenia from October 26, 2011.
Go to NAIST Channel:
Reinforcement Learning of Clothing Assistance with a Dual-arm Robot
Undressing by the Clothing Assistance Robot