
~広報誌「せんたん」から~
[2016年5月号]
高度に知能化する
すべてのモノがインターネットにつながり、有機的に協調して社会を支える「IoT(モノのインターネット)」の時代の到来が目前に迫っている。その際、大規模で複雑なシステムに関わるモノの働きをコンピュータでどのように制御(コントロール)し高性能化するかは基本的な課題だ。こうしたことから、知能システム制御研究室は、「高度に知能化された制御システム」の実現を目指している。個々のモノの機能を数式で表した理論モデルをつくり、合理的に解析して最適に制御できる仕組みを設計する。また、人間が状況を判断し作業に習熟するように、機械が動作を自動的に学習する人工知能(AI)の研究にも挑んでいる。
「制御工学の応用分野は、自動車やロケットから工場の生産設備まで幅広いのですが、われわれの研究室は、それらの基礎となるモデル式のつくり方や、モデルをもとにした制御系の設計法を研究してきました。さらに、コンピュータが自律的にうまく制御できるように機械学習という人工知能の手法も導入しています。その具体的な形としてロボット制御の研究にも取り組んでいます」と杉本教授は説明する。
分散して協調
杉本教授の研究は適応学習制御やシステム同定など理論面が中心だが、スタッフや学生が主導して、電子メールなどインターネットでの通信量を交通整理して効率よく伝えるシステムを提案した。その方法は、通信ネットワークを構成する個々の装置の理論モデルを作り、微分(変化率)や積分(総計)をもとにしたPID制御により、「通信の混雑度の増減」「どの程度この状態が続くか」という混雑の状況をはじき出して制御する。さらに、個々の制御を協調させることによりネット全体の効率化を果たすのだ。現在はネットワークを介した状態推定などにも研究を進めている。

システム制御の研究は、南助教のテーマでもある。大規模な電力ネットワークのシステムで太陽光発電など多種類の電源が地域にあるときに、どの発電機を稼働させて需給バランスを保つか。それぞれの発電機に小さな制御器を載せておき、需要量の情報をみながら、個々に電力系統につなげる(オン)、つながない(オフ)を決めるという内容だ。南助教によると、オン・オフの判断を個々の制御器に分散してまかせるので「システム全体の計算量は増えないし、新たな制御器を付け加えるのも容易」という。また、ユニークな発想は分散照明の研究だ。複数の照明器具をドローンなどでホタルのように浮かせ、人の集まる場所に飛んで行って照らす。分散協調の制御理論を応用できるという。
一方、機械学習という人工知能の分野からシステム制御にアプローチしているのが、松原准教授らの知能ロボットの研究。「研究対象は柔軟なひもを使って梱包するなど、人間でもコツがいるような複雑な作業を行えるロボット。もうひとつは人の動作を物理的に支援する介護ロボットです」と松原准教授。「動くパターンがあらかじめ分からない柔軟物体や人間との相互作用については、事前に数学モデルが決められない。だから、センサーでさまざまなデータを測り、そこから知識を抽出し蓄積する形で学習することになります」。
基礎の理論が大切
こうした研究について、杉本教授は「制御工学の分野は、産業界でもニーズが多いが、共通する基礎的な理論、基盤技術を重視しています。その方が、学生は卒業後に幅広い分野に取り組めます」と強調する。もともと数理的な学問が好きで、数式により機械を操作できる制御工学の道を選んだ。「難解な問題が解けたときは、トンネルから抜け出たように視野がパッと広がります。それが研究の醍醐味です」と話す。京都、奈良の社寺めぐりが趣味で、「散策中に新たな発想が得られることもあります」。
松原准教授は「ロボットの研究なので実用化の時期など出口の成果が大切ですが、一方で大学の研究室として筋道を立てて方法論を研究するようにしています」と語る。「うまく数学的に導けない複雑な動作が、データを解析することで自動的にできるようになったときが一番うれしかった」と振り返る。大学院への進学直前に鉄腕アトム生誕50周年(2002年)を迎えていて、特集番組を見たことなどをきっかけに、機械学習というキーワードを選んだ。「究極的には、研究成果を社会問題の解決に応用する社会実装に貢献したい」と意欲を見せる。研究以外は子育て中心の生活で「子供にロボットへの興味を持たせたい」。
南助教は「理論で新しいシステムをデザインしたいとの思いが常にあり、制御工学の枠にとらわれず、従来の常識を超えた新しいモノを導き出したい」と意気盛ん。「数式はウソをつかず、突き詰めると何か形が見える」ところが面白く、「医療などの分野にも数学を武器にして挑んでいきたい」という。中学時代からテニスを続けており、パワーは十分だ。
国際学会で発表できた
若い研究者も、それぞれのテーマに夢を抱いている。
電力システムの制御を研究する立花幸子さん(博士前期課程1年生)は、「電力需要量の予測値を発電機の数理モデルをもとに適切に整形する研究です。学部のときは、医療画像の研究でしたが、ものづくりに携わりたかった」と志望動機を話す。「将来は、企業で電動自転車など身近な製品をつくりだしたい」という。日曜大工が趣味のリケジョでもある。
石原弘二さん(博士後期課程1年生(ATR連携))は、人型ロボットのモデル予測制御による運動生成の研究だ。「走る、跳ぶ、座るといった動作で、細かく指示しなくてもロボットが考えてできるようになりました。国際学会で発表できたときはとてもうれしかった」と満足そう。「思い通りの研究ができているので、とにかく諦めない」というのが持論。研究のストレス解消はスケボーで「遊ばないと研究はできない」。
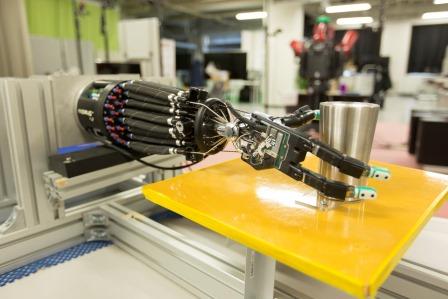
崔允端(サイ・ユンドゥアン)さん(博士後期課程2年生)は、ゴムチューブ製の人工筋肉でできたロボットハンドを圧縮空気により動かす。複雑なシステムだが、うまく使えるような学習手順(アルゴリズム)を開発し、国際学会で発表した。その制御技術を応用した電動車いすの国際共同研究にも参加している。「本学は国際的な環境で留学生が多いのでうれしい。最終的には中国に帰って大学の教員になりたい」という。漫画を描くのが趣味で、本学のウェブ媒体「ナイストエッジ」でも披露した。
特別研究学生のプーン・ジェイムズさんはオーストラリア(シドニー工科大学)から来日し、6か月間、車いすロボットと、操作する人との関わりを研究している。「本学は学生のサポートや設備が非常に充実しています。規模が小さいのでなじみ易く、すぐに研究に着手できました」と話している。


