~広報誌「せんたん」から~
[2019年5月号]

環境を素早く認識
さまざまな機能を備えたロボットのニーズが、製造の現場をはじめ、物流などの現場でも急速に拡大している。知的なシステムであるロボットが周囲の環境を見極めて有効に対応する能力が高まったためで、指示する人間とうまくかみ合って協働作業できるようになってきた。この分野を先導してきた小笠原教授は、「ロボットを視覚や触覚の情報に基づいて制御し、円滑で安全なサポートが提供できるシステムなどの開発研究を行っています」と説明する。
人間との協働作業では、まず、ロボットが機械や障害物、人間の動きなど現場の状況をセンサで計測して認識する。そのデータから、現場空間の位置関係などがわかる環境地図が描かれ、それをもとに適切な動作を生み出す。研究室では、さらに拡充したサービスを実現するために、身の回りのさまざまな物を取り扱うための柔軟物ハンドリング技術、触覚情報を用いた器用な物体操作などに取り組んでいる。
心理的な影響も配慮
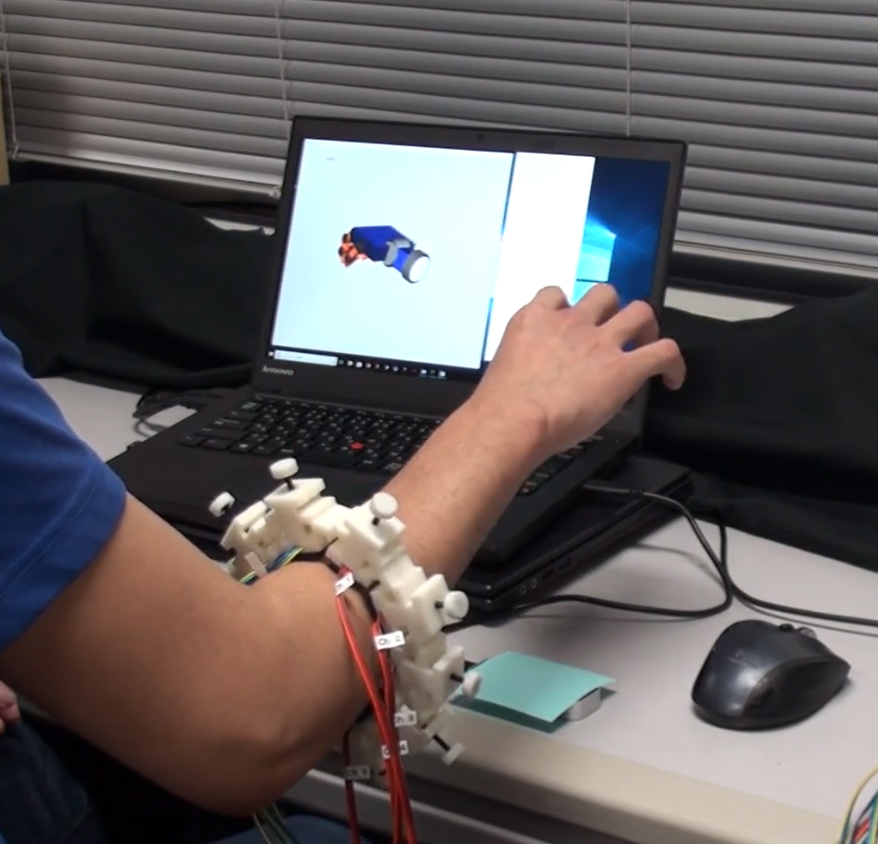
手と指の動きの推定
一方、ロボットが人に接するときの心理面での影響を踏まえて効果を高めるという新たな視点での開発もある。受付などの人型の案内ロボットには、人の視線を測ることにより心理状態を推測し、応答の際の自然なアイコンタクトや美しい所作を身に付けさせた。また、介護の場合、身体を撫でるケアでは、ロボットハンドは手のひら大で適度な柔らかさなどが必要という条件をつきとめて試作した。
さらに、ロボットの研究で培われた測定の技術を腕のアシストに生かす研究もある。腕輪のように前腕部にはめるだけで、運動時の筋肉の隆起の状況がわかる「距離センサアレイ」を作製。皮膚表面の電位差から筋肉の動きを測定する筋電計とは違った、様々な体組織の活動によって生じる形状変化を測定することにより、手や指の動きを推定する。リハビリや、ロボットハンドの遠隔操作などの分野での利用が期待される。
小笠原教授は、東京大学大学院から、知能ロボットの研究をはじめ、電子技術総合研究所(現在の産業技術総合研究所)、本学と研究の場を移りながらも40年近く、ロボット研究に取り組んできた。本学では、「身近で生活をサポートするロボット」の研究に取り組み、人と対話するヒューマノイドロボット、ロボットの腕(マニュピレータ)、手(ハンド)、計測センサなどの研究や、案内ロボットの「ASKA」「たけまる」も手掛けた。
「ロボットの研究は、本体が実際にうまく動いてこそ完成で、理論だけでおしまいというわけにはいかない」との信念があり「ここ数年、これまでにない分野での実用化の機運が盛り上がっているので、企業、ベンチャーなどとのコラボも考えていきたい」と抱負を語る。
動作を高速化
高松准教授の主要なテーマは、ロボットの手足の操作と、搭載したカメラなどによる物体や環境空間の画像認識だ。最近の成果の一つが、人型ロボットがドアを開閉する際の動作時間の高速化。作業時のロボットの腕にかかる力などをあらかじめ設定し、全身のバランスを予測しておくことで、計算時間を短縮し、自然で安定な動作を生み出した。
また、日常生活を研究する家政学との連携もある。人の顔の向きなどの画像情報から、AI(人工知能)の技術で視線の方向を推定し、テレビの視聴などの行動を判別する方法を構築した。
また、橿原考古学研究所と共同で古墳時代の甲冑(かっちゅう)の立体データから平面図をつくり、比較する方法を開発。他の甲冑と一致する部品があり、甲冑制作に平面的な設計図「型紙」が使用されたとするこれまでの想定を追認することができた。
「ロボットの分野は、さまざまな要素技術を使うだけにブラックボックスがあり、きちんと理論的につきとめておく必要があります」と強調。「本学は、さまざまな種類のロボットがあり、使えるのも大きなメリット」という。自宅では、アクションゲームを楽しむ。
中国出身の丁(ディン)助教は、特定の筋肉の活動をモニターして鍛えるパワーアシストの装置をテーマに本学で博士号を取得した。「人がロボットと協働作業するときの効率的な補助や、人の動作の測定、解析の方法などの研究を行っている。大学では、将来役立つとみられる先端分野にまで及んで研究できるのが楽しい」と意欲をみせる。ロボット研究で知られる米国の大学にも派遣されて研究生活を送ったが、「さらに世界をくまなく歩いて、研究の視野を広げ、交流を深めたい」と話す。
世界に実力を見せた
ロボットシステム
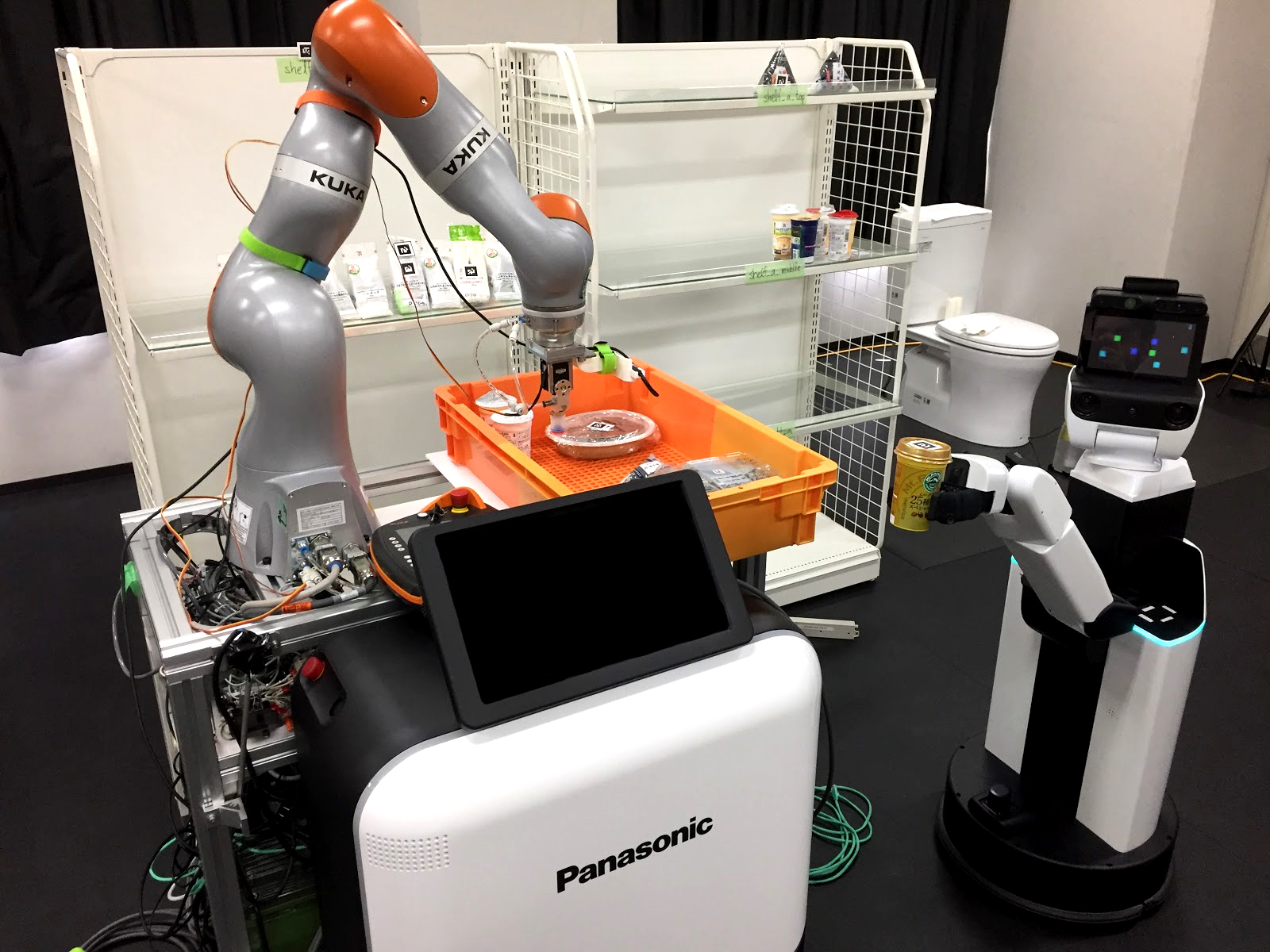
こうした多彩な研究を背景にした実力が評価されたのが国際的なロボット競技会で研究室メンバーのチームが3年連続で高成績を上げたこと。まず、2016年のロボットの国際学会「ICRA」(ストックホルム)で開催された「エアバス・ショップフロア・チャレンジ」では、アルミ板に1時間で255個の穴を開ける課題に挑戦し、優勝した。これをきっかけに、翌年には、「アマゾン・ロボティクス・チャレンジ」(名古屋市)で、商品を取り出す倉庫の作業に取り組み、参加した日本勢の中で唯一決勝ラウンドまで残った。そして、18年に東京で開かれた国立研究開発法人新エネルギー・産業技術総合開発機構と経済産業省主催のワールドロボットサミット(WRS)の「フューチャーコンビニエンスストアチャレンジ」の接客部門で1位を獲得した。
一連のコンテストでチームリーダーを務めたのがガルシア助教(当時博士研究員)。「勝ちたいというモチベーションのもとに集まり、ロバストでスマートなシステムを一丸となって頑張った成果です。とてもうれしかった」と振り返る。
メキシコの大学から、本学の修士課程に入り、日常の環境や物流現場など、人とロボット技術が関わる場での安全性をテーマに研究に取り組んできた。
「研究者として、知識の創造をめざしていますが、この知識を現実世界の問題に適用することも非常に重要です」と張り切る。本学については「学内の交流だけでなく、他大学や企業とのコラボもあり、やりたいテーマに出会う機会が必ずあります」と期待する。時間を見つけては、大学近くのジムで水泳、公園でバレーボールに励み、体力づくりに余念がない。
エクアドルからの留学生のウリグエン・ペドロさん(博士後期課程1年生)もエアバスチャレンジなどの競技会に出場した。今の研究テーマもコンビニの棚を片付けるなどの片づけロボット。「掃除が好きでないので、ロボットにさせられないかとの発想です。研究の過程で多くのことを学べて面白い」と満足そう。日本の歴史も好きで、特にサムライがいた江戸時代の文化に読書やビデオで親しんでいる。
一方で、これまでにない応用分野の研究に挑んでいるのが由井朋子さん(博士前期課程1年生)だ。歯科衛生士の資格があり、歯石を取るスケーリングの練習に使うロボットの研究がテーマ。「センサなど装置の検討の段階で、将来は広く教育に使えるようにしたい」と話す。由井さんの趣味は掃除で、これも研究にマッチしている。